The Department of Computer at the Faculty of Science holds a virtual workshop via the ZOOM platform entitled “On the Effectiveness of Optic-flow sensor Odometry in Cooperative Transport” in which a group of the teaching staff members are present.
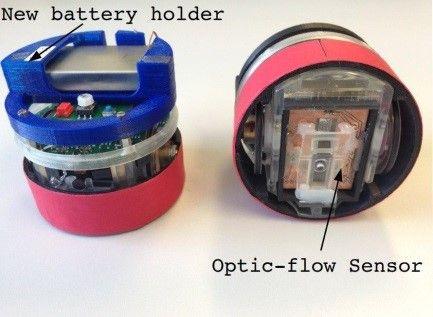
Dr. Muhannad Haider Muhammad explains that the experiments he conducts to evaluate the performance of the sensor that he developed and added to “e-pucks” robots to enable them to accurately calculate their paths and direction of rotation while transporting heavy objects collectively.
He indicates that the sensor is a small camera that visualizes the surfaces that the robot passes during movement, and then the sensor compares the pictures taken using a special algorithm to determine the offset toward the coordinates (x, y).
Dr. Muhannad Haider Muhammad adds that he presented his work as a research paper for the international conference “Swarm Intelligence”, which will be held next October in Barcelona, Spain.