أقام قسم الحاسوب في كلية العلوم ورشة عمل افتراضية عبر برنامج ZOOM تحت عنوان (دراسة في قياس فعالية مستشعر التدفق البصري في تحديد موقع الروبوتات اثناء نقل الأجسام الثقيلة جماعياً) ”On the Effectiveness of Optic-flow sensor Odometry in Cooperative Transport” شارك فيها مجموعة من تدريسي القسم.
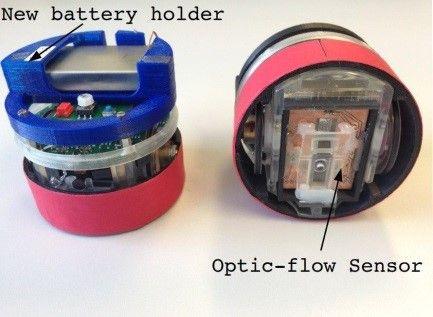
وأوضح الدكتور مهند حيدر محمد ان التجارب التي اجراها لتقييم اداء الحساس الذي قام بتطويره وإضافته لروبوتات من نوع “e-pucks” ليمكنها من حساب مساراتها واتجاه دورانها بدقة اثناء نقل الأشياء الثقيلة بصورة جماعية,
مبينا ان الحساس عبارة عن كاميرا صغيرة تقوم بالتصور السطوح التي يمر عليها الروبوت اثناء الحركة ومن ثم يقوم الحساس بمقارنة الصور التي تم التقاطها باستخدام خوارزمية خاصة لتحدد الإزاحة المقطوعة بإتجاه الاحداثيات (x,y).
وأضاف انه قدم عمله هذا كورقة بحث للمؤتمر العالمي“Swarm Intelligence” الذي سيقام في شهر تشرين الأول القادم في مدينة برشلونا الاسبانية.